Graphing and Writing Linear Functions SOLVING EQUATIONS INVOLVING RATIONAL EXPONENTS Linear Equations and Graphing Systems of Linear Equations Solving Polynomial Equations Matrix Equations and Solving Systems of Linear Equations Introduction Part II and Solving Equations Linear Algebra Graphing Linear Inequalities Using Augmented Matrices to Solve Systems of Linear Equations Solving Linear Inequalities Solution of the Equations Linear Equations Annotated Bibliography of Linear Algebra Books Write Linear Equations in Standard Form Graphing Linear Inequalities Introduction to Linear Algebra for Engineers Solving Quadratic Equations THE HISTORY OF SOLVING QUADRATIC EQUATIONS Systems of Linear Equations Review for First Order Differential Equations Systems of Nonlinear Equations & their solutions LINEAR LEAST SQUARES FIT MAPPING METHOD FOR INFORMATION RETRIEVAL FROM NATURAL LANGUAGE TEXTS Quadratic Equations Syllabus for Differential Equations and Linear Alg Linear Equations and Matrices Solving Linear Equations Slope-intercept form of the equation Linear Equations DETAILED SOLUTIONS AND CONCEPTS QUADRATIC EQUATIONS Linear Equation Problems Systems of Differential Equations Linear Algebra Syllabus Quadratic Equations and Problem Solving LinearEquations The Slope-Intercept Form of the Equation Final Exam for Matrices and Linear Equations Linear Equations |
Linear Equations and Matrices• linear functions Linear functionsfunction f maps n-vectors into m-vectors is linear if it satisfies: • scaling: for any n-vector x, any scalar α, f(αx)
= αf(x) example: f(x) = y, where
let’s check scaling property:
Matrix multiplication and linear functionsgeneral example: f(x) = Ax, where A is m × n matrix • scaling: f(αx) = A(αx)
= αAx = αf(x) so, matrix multiplication is a linear function converse: every linear function y = f(x), with y an m-vector and x and you can get the coefficients of A from
Composition of linear functionssuppose • m-vector y is a linear function of n-vector x, i.e., y = Ax where A is then z is a linear function of x, and z = By = (BA)x so matrix multiplication corresponds to composition of linear functions, Linear equationsan equation in the variables x1, . . . , xn is called linear if each side
consists
is a linear equation in x1, x2, x3 any set of m linear equations in the variables x1, . . . , xn
can be Ax = b, where A is an m × n matrix and b is an m-vector Exampletwo equations in three variables x1, x2, x3:
step 1: rewrite equations with variables on the lefthand side, lined
up in
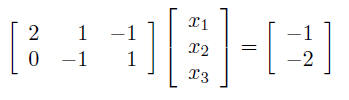
(each row is one equation) step 2: rewrite equations as a single matrix equation:
• ith row of A gives the coefficients of the ith equation Solving linear equationssuppose we have n linear equations in n variables x1, . . . , xn let’s write it in compact matrix form as Ax = b, where A is an n × n suppose A is invertible, i.e., its inverse A−1 exists multiply both sides of Ax = b on the left by A−1:
lefthand side simplifies to A−1Ax = Ix = x, so we’ve solved the
linear so multiplication by matrix inverse solves a set of linear equations • x = A−1b makes solving set of 100 linear equations in 100
variables • fortunately, it’s very easy (and fast) for a computer to compute many scientific, engineering, and statistics application programs • from user input, set up a set of linear equations Ax = b when A isn’t invertible, i.e., inverse doesn’t exist, • one or more of the equations is redundant (these facts are studied in linear algebra) in practice: A isn’t invertible means you’ve set up the wrong equations, or Solving linear equations in practiceto solve Ax = b (i.e., compute x = A−1b) by computer, we don’t
compute practical methods compute x = A−1b directly, via specialized
methods standard methods, that work for any (invertible) A, require about n3 but modern computers are very fast, so solving say a set
of 500 equations . . . which is simply amazing Solving equations with sparse matricesin many applications A has many, or almost all, of its
entries equal to zero, this means each equation involves only some (often just a
few) of the sparse linear equations can be solved by computer very
efficiently, using it’s not uncommon to solve for hundreds of thousands of
variables, with . . . which is truly amazing (and the basis for many engineering and scientific
programs, like simulators |